
フィジカルAIとは、さまざまな状況や条件を自ら判断し、物理世界での自律的行動を可能にするAI技術群の総称です。文章や画像、音楽などをデジタル上で作成する生成AIとは異なり、ロボットや機械が物体や空間といった現実世界を認識し、状況に応じた判断と実際の動作を自律的に行います。
製造や物流、医療、介護、農業、小売、サービスなどの業界では、人手不足や非効率な業務が構造的な課題となっています。フィジカルAIは、こうした課題の解決が期待できる革新的な技術として注目を集めています。
今回は、フィジカルAIの仕組みやメリット、生成AIとの違い、活用事例、注意点を解説します。
フィジカルAIとは?

フィジカルAIとは、現実の物理空間を認識し、今ある状況を判断した上で、実際に物理的な行動を実行できる人工知能技術です。従来の生成AIが文章や画像などを生み出す「デジタル上で考えるAI」だとすれば、フィジカルAIはロボットや機械を通じて現実世界に働きかける「物理的に動くAI」といえます。
IT技術の発展で、GPUの演算能力、カメラ・センサーの認識能力、AIの学習・分析・判断能力、遅延の少ないデータ転送能力などが向上し、これらの技術が相互に組み合わさることで、従来では難しかった『複雑な物理空間の認識』→『状況判断』→『状況に応じた適切な動作の実行』という一連の作業が可能になりつつあります。
例えば、従来のロボットは事前に設定された条件に応じてプログラムが実行され、迅速かつ反復的に作業を行うことができます。しかし、動作に必要な条件が変わってしまうと正確な作業を行うことが困難になるケースも多いため、生産ラインの停止や不良品の発生が起きてしまうリスクがあります。条件変更に対応するためには、その都度プログラムやロボットの調整が必要となるため、あいまいな条件を吸収して作業をしたり、複雑な条件下で一定の動作をしたりすることが難しいという課題があります。
一方、フィジカルAIは、事前に学習したデータをもとに、複雑な条件にも適切な判断を行い、自律的に最適な動作を行うことができます。例えば、生産に必要な部品がバラバラな置き方で流れてきても、縦横や表裏をカメラやセンサーで認識し、適切な角度でアームを動かし、間違いなく製品に取り付けることができます。フィジカルAIを活用することで、車の自動運転や人型ロボット(ヒューマノイド)、配送ドローン、危険エリアでの無人作業などの実現が加速します。
そのため、人手不足や生産性向上、安全性の確保といった社会課題の解決が期待されており、製造業や物流、医療、介護、農業、小売、サービスなど幅広い分野でフィジカルAIの導入が進みつつあります。
生成AIとフィジカルAIの違いを以下にまとめました。
生成AIとフィジカルAIの違い
| 生成AI | フィジカルAI | |
|---|---|---|
| 主な目的 | 文章・画像・音声などのコンテンツ生成 | 現実世界での自律的な行動・作業実行 |
| 主な学習データ | インターネット上のテキスト・画像・音声など | 物理法則・センサーデータ・シミュレーションデータ |
| 入力情報 | テキスト、画像など | カメラ、LiDAR※1 、マイクなどのセンサー情報 |
| 出力結果 | 文章、画像、動画、コードなど | ロボットの動作、移動、操作などの物理的アクション |
| 代表的な製品や開発基盤 | ChatGPT、Gemini、Claudeなど | NVIDIA Isaac※2 、ROS 2※3 、MuJoCo※4 、Gazebo※5 など |
| 必要な技術 | 大規模言語モデル、画像生成モデル | センサー技術、マルチモーダルAI※6 、物理シミュレーション、強化学習 |
| リスク | 誤情報生成(ハルシネーション※7 ) | 物理的事故や誤作動、サイバー攻撃 |
生成AIはデジタルコンテンツの作成を効率化します。フィジカルAIは、物理的な作業や動作を人間の代わりに行うことが可能です。
ただし、生成AIとフィジカルAIはまったく別ものの技術ではありません。フィジカルAIは、生成AIとロボティクスの技術を融合することで、現実世界における人手不足や業務の効率化といった課題を解決へと導きます。
※1 LiDAR(ライダー:Light Detection and Ranging):レーザー光を照射し、対象物から反射して戻ってくるまでの時間を測定することで、周囲の物体の形状や距離を検知する技術。
※2 NVIDIA Isaac:AIロボット開発やシミュレーションを効率化するプラットフォーム。
※3 ROS 2:ロボット開発に必要なライブラリやツールを備えたミドルウェア。
※4 MuJoCo:高速かつ正確な物理演算を特徴としたシミュレータ。
※5 Gazebo:オープンソースのロボット開発用3Dシミュレータ。
※6 マルチモーダルAI:テキストや音声、画像、センサーデータなどの複数の情報を統合的に処理し、分析や活用を行う人工知能。
※7 ハルシネーション:事実に基づかない内容や誤情報を、もっともらしく生成してしまう現象。
フィジカルAIの仕組み

フィジカルAIが動く仕組みは、人間が作業を行う仕組みと似ています。
- 見る(環境を認識する)
- 考える(状況を理解して判断する)
- 動く(必要な動作を行う)
見る(環境を認識する)
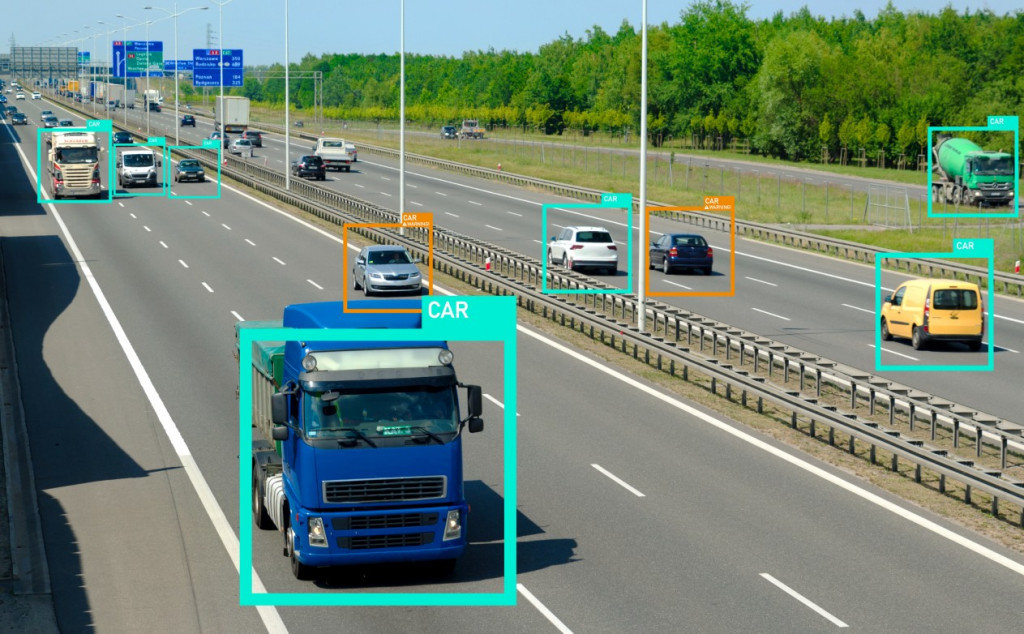
カメラやレーザー、LiDAR、マイク、触覚センサーなどを使って、対象物や周囲の環境に関する情報を取得します。これは人間が目や耳、手を使って周囲の状況を把握することに近い働きです。
例えば、製造ラインに流れてくる製品の種類や状態によって次に行うべき作業が変わる場合、現状を高い精度で認識する必要があります。
物体の種類や大きさ、距離、動きなどのデータは、ロボットや機械の内部にあるエッジコンピューター※8 でリアルタイムに処理される場合や、大規模な分析や学習を行うためにクラウド上のサーバーに送信される場合があります。
※8 エッジコンピューター:情報源と近い位置(エッジ)で情報を処理することで、遅延の少ない判断や動作を行う技術。
考える(状況を理解して判断する)

取得したデータはAIで処理されます。カメラやマイク、センサーなどで取得したデータを統合的に解析する際は、マルチモーダルAIを利用する場合もあります。ここで作業手順や周囲の状況、障害物の有無などが確認され、目的を達成するための最適な判断が行われます。
例えば、どの部品をどのくらいの数でどこに取り付ければ良いのかを判断し、必要な行動が計画されます。
動く(必要な動作を行う)

AIの判断結果をもとに、ロボットや機械が必要な動作を行います。動作中もカメラやセンサーで情報を取り込み、状況の変化に応じた修正動作が行われます。
行動結果が良好な場合、フィードバックとして高い報酬を与えるとフィジカルAIは行動の精度をさらに向上させることができます。これを強化学習と言います。行動結果に問題があった場合は、報酬を低くすることでより良い結果を導くために必要な行動を学習していきます。
こうしたフィードバックと強化学習を繰り返すことで、フィジカルAIの判断や動作がさらに高度なものへと進化するという好循環が生まれます。
フィジカルAIの導入方法
フィジカルAIを導入するには、以下のステップで行います。
- フィジカルAI導入の目的や課題を明確にする
- プラットフォームや開発基盤を選定する
- シミュレーション空間で事前学習を繰り返す
- 現場で実機テストを行い、精度と安全性を検証する
- 導入後も改善を繰り返し、学習を継続する
それぞれを解説します。
①フィジカルAI導入の目的や課題を明確にする
まずはフィジカルAIの導入で目指したい目的や解決したい課題を明確にしましょう。目的や課題の設定が曖昧なままだと、導入が途中で頓挫したり、導入が目的化したりして、本質的な効果が得られない可能性があります。
例えば、
- ⚪︎人分の人手不足を補いたい
- 不良率を⚪︎%に低減したい
- 人が行う危険作業をゼロにしたい
- 生産性を⚪︎%向上したい
といった課題に対して、フィジカルAIをどう活用していくのかを考えることが重要です。また、環境や条件といった変数が多く、ルール化が難しい課題も多いはず。こうした課題は従来型のロボットや機械では解決が難しく、フィジカルAIの導入効果を実感しやすい可能性があります。
さらに長期的なスケジュールや予算、定性的・定量的な効果測定方法も検討しておくことをおすすめします。
②開発プラットフォームやシミュレーション基盤を選定する

目的や課題が明確になったら、最適なフィジカルAI開発プラットフォームやシミュレーション基盤を選定します。
代表的なプラットフォームには、NVIDIA IsaacやROS 2などがあります。シミュレーション環境には、NVIDIA OmniverseやMuJoCo、Gazeboなどがあります。
フィジカルAIのプラットフォームや開発基盤を利用することで、事前学習の準備や開発環境の構築がスムーズになります。また、基本的な物理法則の理解やロボットや機械へ組み込むための連携機能などが実装されているケースでは、仮想空間でのシミュレーションの準備や実機テスト、本番環境への適応に必要な時間を大幅に短縮できます。
③シミュレーション空間で事前学習を繰り返す
現実世界で学習を行おうとすると、学習に要する時間とコストが大きくなり、十分な学習を行うことができません。また、人や建物にぶつかったり、資材や設備を壊したりするリスクもあるため、まずは仮想空間やデジタルツイン※9 上で十分な学習を行います。
シミュレーション空間を活用することで、
- さまざまな条件下でテストができる
- 危険が伴うテストも安全に行える
- 何千回、何万回でも学習が繰り返せる
といったメリットがあります。AIの学習精度を向上させるには、高速で失敗や試行錯誤を繰り返すことが大切です。シミュレーション空間であれば物を壊したり、周囲にぶつかったりしても物理的な損失が発生しません。シミュレーション空間で十分な事前学習を行うことで、現実世界でのテストをより安全かつ効率的に行えるようになります。
※9 デジタルツイン:IoTやセンサーで収集したデータを活用し、現実空間と瓜二つの空間をデジタル上に再現する技術。
④現場で実機テストを行い、精度と安全性を検証する

シミュレーション空間で学習したモデルを、現場の実機に実装し、作業の精度や安全性を検証(Sim-to-Real:シム・トゥ・リアル)します。センサーの誤差調整や想定外の環境・条件への適応力の確認も行います。また、安全性(周囲の人や物、設備などに危害を与えないか)や耐久性(ロボットや機械が壊れることなく稼働できるか)を確認することも重要です。
現実世界で検証した結果は、再びシミュレーション空間にフィードバックし、学習精度をさらに高めていくことにも活用できます。
⑤導入後も改善を繰り返し、学習を継続する
フィジカルAIは、導入して終わりではありません。事前に期待した効果が得られているかを、定性的・定量的に確認しましょう。また、実際の運用データを収集し、成功パターンや失敗パターン、環境や条件の変化への対応状況などを分析し、再学習を行うことも重要です。
従来の自動化やロボティクスとの大きな違いは、学習を続けることでフィジカルAIの精度や安定性が向上していく点にあります。「データ収集→シミュレーション→再学習」を繰り返しながら、さまざまな環境や条件の変化に適応できるモデルへと成熟させていきましょう。
フィジカルAIの主なメリット
フィジカルAIの主なメリットは以下の5つです。
- 自動化できる範囲が大幅に拡がる
- 生産性や業務効率が向上する
- 人手不足の緩和が期待できる
- 従業員の安全性が向上する
- コスト削減や働き方改革につながる
それぞれを活用シーンとともに解説します。
①自動化できる範囲が大幅に拡がる
従来のロボットや機械による自動化は、事前に設定したルールと一定条件のもとで行われていました。そのため、環境や条件の変化に適応することが難しく、自動化できる範囲も限定的でした。
一方、フィジカルAIは状況に応じた柔軟な判断と動作ができるため、これまで自動化が難しかった作業にも対応できるようになります。
【活用シーン】
例えば製造業では、異なる製品がラインに流れてきても、状況の変化に応じて適切な部品を選択して取り付けることができます。また、物流業界では、大きさや重さ、形状、配置が毎回異なる荷物でも、適切な仕訳や出荷が可能となります。
ルール化が難しいために人が行っていた作業も、フィジカルAIなら継続的な学習と改善を積み重ねることで自動化を目指せます。
②生産性や業務効率が向上する

フィジカルAIは、周囲の状況をリアルタイムに認識しながら最適な動きを選択できます。これにより、ライン作業の遅れや無駄な待ち時間を減らすことができ、同じ工程でもより短時間で生産することが可能となります。また、状況に応じた柔軟な動作や作業ができるため、人による設定変更や監視といった負担を減らし、業務効率の向上も期待できます。
【活用シーン】
例えば食品工場では、メニューごとに異なる食材を選んで調理や盛り付けを行い、作業を止めることなく連続的な生産が可能です。人と違って休憩や交代が不要なため、長時間の連続稼働ができ、生産ラインの処理能力を大幅に増やすことができます。
③人手不足の緩和が期待できる
複雑な条件下でも正確に作業できるフィジカルAIは、多くの業界で深刻化する人手不足を緩和する効果が期待されています。人とフィジカルAIが仕事を分担することで、少ない人手でもこれまで以上の仕事量を処理できるようになります。
【活用シーン】
例えば介護業界では、歩行支援や見守り、送迎、物品の運搬などをフィジカルAIが担当することで、介護スタッフは本当に人手が必要なケアに集中できるようになります。また、農業では、収穫や選別作業を自動化することで、少人数でも大規模な収量に対応できる体制が整います。
フィジカルAIは、人が行っていた作業のすべてを置き換えるというよりも、人が担うべき業務への集中を支援します。これにより、人手不足を緩和し、業務の持続可能性を高めます。
④従業員の安全性が向上する

危険が伴う作業や身体への負担が大きい業務をフィジカルAIに任せることで、労働災害や事故のリスクの低減につながります。従業員の安全や安心につながるだけでなく、事業の継続性を高める上でも大きなメリットがあります。
【活用シーン】
例えば建設業や設備業では、高所作業や危険なエリアの点検、製造業では高温環境での作業や重量物の運搬などをフィジカルAIに置き換えることで、安全かつ効率的に業務を行うことができます。また、万が一事故が起きても人的被害を抑えられるため、企業の経営リスクを低減する効果も期待できます。
⑤コスト削減や働き方改革につながる
フィジカルAIを活用することで、長期的には人件費や作業ミスによる損失の削減が期待できます。また、24時間フル稼働できる生産体制が整うことで、限られた人員や設備でも高いコストパフォーマンスを発揮できます。人手を必要とする業務が削減されることで、夜勤や休日出勤、長時間労働などの働き方改革の促進も期待できます。
【活用シーン】
例えば物流業界では、荷物の運送や積み込み、倉庫作業などをフィジカルAIに置き換えることで、人件費の一部を削減する効果が期待できます。自動運転トラックや配送ドローンが発達すれば、長距離配送によるドライバーへの負担を大幅に減らすことができるでしょう。
また、医療現場では、今後、手術の一部工程の支援や検査・採血業務の補助、夜間巡回の自動化などへの活用が進む可能性があります。医療従事者の監督のもとで業務を補助することで、医療スタッフの負担軽減や労働時間の適正化につながることが期待されています。これにより、医療スタッフは患者との対話や、より高度な医療の提供などに集中できるようになり、結果として患者の満足度の向上も期待できるでしょう。
フィジカルAIの課題や注意点
メリットの多いフィジカルAIですが、導入や運用にあたっては課題や注意すべき点もあります。主な課題や注意点は以下の5つです。
- 導入コストが高くなりやすい
- シミュレーションと現実のギャップが生じやすい
- 安全性の確保やセキュリティ対策が必要になる
- 導入後も継続的に改善や学習を行う
- 人との役割分担を明確にしておく
それぞれを解説します。
①導入コストが高くなりやすい
フィジカルAIを導入するためには、AIなどのソフトウェアだけでなく、ロボット本体や機械、センサー、エッジコンピューター、通信機器などのハードウェアも必要になります。また、シミュレーション環境の構築や学習データの整備には専門的な知識とコストが必要となるため、一般的なITシステムや従来式のロボットの導入よりも初期投資が大きくなりやすいです。
そのため、フィジカルAIの導入でどのような投資効果を期待するのかを明確にしておきましょう。また、ファインチューニングや再学習では追加投資が必要になる場合もあるため、導入後の運用コストも計画しておくことが望ましいです。
②シミュレーションと現実のギャップが生じやすい

フィジカルAIでは、シミュレーション環境で事前学習と動作検証を行うことが一般的ですが、実際の現場では想定通りに動作しない場合もあります。例えば、照明や気温の変化、床の色、周囲の備品、センサーのノイズ、人の声や動きなど、現実世界には予測しづらい要素が多く存在します。
こうしたシミュレーション空間と現実世界のギャップ(Sim-to-Real Gap:シム・トゥ・リアル・ギャップ)を小さくするためには、現場のさまざまな条件での実機テストや、より多様なデータ収集、ファインチューニング、再学習などが有効な対策となります。
③安全性の確保やセキュリティ対策が必要になる
フィジカルAIは物理的な動作を伴う仕組みであるため、誤作動や急激な動き、振動、音などが人や設備に重大な影響を与える可能性があります。現実世界の人や物に不可逆的な損害を与える可能性もあるため、特に失敗やミスが許されない食品製造の現場や医療・介護の現場、公道での自動運転などでは、十分な安全確保と現場での動作検証が必要です。
緊急停止機能や異常検知による自動停止機能、周囲の人や物と一定の安全距離を保つ制御機能などを備えることに加え、運用ルールや監視体制、責任の所在などの明確化も重要です。
また、ネットワーク接続を伴うケースでは、外部からのサイバー攻撃や内部からの情報漏洩にも対策が必要です。ID・パスワードの適切な運用やアクセス権の管理、セキュリティパッチの更新、入退室管理などを徹底し、乗っ取りや情報漏洩などのリスクに十分な対策を行うことが重要です。
④導入後も継続的に改善や学習を行う

フィジカルAIは導入して終わりではなく、運用しながら学習を積み重ねて育てていく仕組みです。そのため、運用データの分析やファインチューニング、モデルの再学習、シミュレーション環境の更新、新しいデータの取り込みなどを継続的に行い、改善を繰り返していくことが重要です。
導入後の長期的な運用体制やKPIの設定、予算の確保、適用範囲の拡大などを検討するために、経営層や各部門責任者も含めた定例会議の実施をおすすめします。
⑤人との役割分担を明確にしておく
フィジカルAIは人間のすべての仕事を完全に置き換えるものではなく、人との役割分担を適切に行うことで効果を最大限に発揮できます。例えば、長時間の単純作業や危険が伴う作業、夜間や休日に行う作業、集中力や忍耐力を必要とする作業などが置き換わると、人がより専門性の高い業務に注力できるようになります。人とフィジカルAIが協働することで、企業全体の生産性や付加価値が向上する結果に結びつけることが重要です。
そのため、どこまでをフィジカルAIが担当し、どこから人が判断・対応するのかを明確にしておきましょう。導入時には技術面の検証だけでなく、現場オペレーションや業務フローの設計、作業導線の確認、緊急時の対応マニュアルの作成なども同時に進めておくことをおすすめします。
まとめ フィジカルAIについて

今回は、現実世界で物理的な作業や動作を柔軟に行えるフィジカルAIについて解説しました。
デジタル上でコンテンツを作成する生成AIとは異なり、フィジカルAIは人や物に直接働きかける仕事を人の代わりに行うことが可能です。また、ルール化された業務を繰り返す従来のロボットや機械とは異なり、状況に応じた柔軟な判断で作業を効率的に進めることができます。
事前学習やファインチューニングなどを繰り返し行う必要はありますが、人手不足の緩和や生産性の向上、働き方改革の推進、長期的なコスト削減などのメリットが期待できます。
ただし、フィジカルAIの導入目的や人との役割分担を明確にしておくことが大切です。また、人や物に危害を与えないよう、安全性の確保やセキュリティ対策には万全の対策が必要となります。
GREEN CROSS PARKのDX

東急不動産が展開する産業まちづくりプロジェクト「GREEN CROSS PARK(グリーンクロスパーク)」は、まち全体に先進的なDX基盤整備を行う構想のある新しい産業団地です。高速通信や自動運転技術の先行整備などにより、フィジカルAIを含む先端技術が活用しやすい環境づくりにつながります。
高度なAI技術やインフラ環境の整備を促進し、ここに集う産業に新たな可能性を広げます。